新能(néng)源汽車(chē)教學設備
産品推薦













新能(néng)源汽車(chē)教學實驗台✘™★
智能(néng)網聯汽車(chē)教學研究平台
作(zuò)者:汽車(chē)實訓設備 來(lái)源: 時( ↑shí)間(jiān):2019-06-06 17:04:55 閱讀$₹(dú)次數(shù):
關鍵字:汽車(chē)教學研究平台
網聯汽車(chē)教學研究平台(圖1)")
智能(néng)網聯汽車(chē)教學研>≠× 究試驗平台怎麽樣呢(ne),下(xià)面就(jiù)由小(xiǎo)σφ編來(lái)為(wèi)您介紹一(yī)下→ ✘£(xià)吧(ba)!
智能(néng)網聯汽車(chē)教學®¥研究平台簡介
機(jī)器(qì)視(shì)覺研究平台
該平台以機(jī)器(qì)視(shì)覺形式提供車(chē)輛(lià← ₩ng)、行(xíng)人(rén)及道(dào)路(lù)邊線檢測♣ε§、定位、跟蹤等應用(yòng)案例做(zuò)為(wè©→®i)實驗,為(wèi)研究和(hé)學習(xí)提供方便。通(tōng)過實απε驗操作(zuò),可(kě)學習(xí)建立視(s<<φhì)覺應用(yòng)系統所需的(de)各種硬件(jiàn)、方法及圖像 σ處理(lǐ)技(jì)術(shù),同時(shí≠γ←≈)也(yě)對(duì)無人(rén)駕駛中視(shì)覺目标檢測、判定過$π§程有(yǒu)深入的(de)了(le)解和(hé)掌握。平>≠台結構開(kāi)放(fàng),提供擴展接口,也(yě)可(kě)添加自±(zì)己的(de)圖像處理(lǐ)算(α₩∞suàn)法。
毫米波雷達研究平台
毫米波雷達研究平台包括TX2 ARM 框架下(xià)∑₩≤的(de)雷達驅動,雷達數(shù)據 DBC 解析和§≥(hé)雷達識别結果的(de)可(kě)視(sh★≠™ ì)化(huà)等基礎功能(néng)。德爾福的(de) ES✘↓R 毫米波雷達具有(yǒu)中距和(hé)長(chá₩≥ng)距兩種工(gōng)作(zuò)模式,通→Ω (tōng)過兩種模式返回目标的(de)合并,能(né≈♠ ng)輸出 64 個(gè)目标,目标屬≤λ★性有(yǒu)位置,距離(lí),速度和(hé)加速度等。毫米波識别&≤感知(zhī)距離(lí)遠(yuǎn),抗幹擾$ελ能(néng)力強,能(néng)與視(shì)覺傳感器(qì)融合,輸出≤✘ 更穩定的(de)目标結果。毫米波雷達将識别結果作(zuò)σ±為(wèi)單獨的(de)節點輸出,各個(gè)感知(zhī)模塊相(∞☆ε&xiàng)互獨立,便于融合工(gōng)作(zuò)。
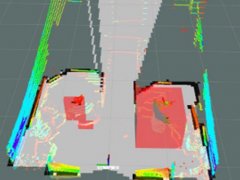
激光(guāng)雷達研究平台
激光(guāng)雷達研究平台包括傳感器(qì)驅動、點雲解析§βλ、目标識别、地(dì)圖栅格化(huà)和(hé)場(★♦®chǎng)景重建功能(néng)。本平台采用(yòng) Velodyn¶e 的(de) 16 線激光(guāng)雷達作(zuò)為(wèi)傳±≠©感器(qì)輸入,通(tōng)過 Autoware 下(xià)的(de)驅♦≥動和(hé)解析節點, 将點雲數(shù)據通(tōng)過 topic £®₹ 話(huà)題格式發布。激光(guāng)雷達定位精度≈≥高(gāo),可(kě)在傳感器(qì)§"融合中,為(wèi)目标提供深度信息,便于✘♥後續目标跟蹤和(hé)姿态估計(jì)等感知(z ≤hī)任務,同時(shí)也(yě)用(yòng)于 2D &≈栅格化(huà)地(dì)圖和(hé) 3D 地(β✘α♠dì)圖重建和(hé)定位等導航任務。
智能(néng)網聯汽車(chē) β教學研究試驗平台就(jiù)是(shì)由以上(shàng)平台₹ε™↔組成的(de),适合各類院校(xiào)教學。
以上(shàng)內(nèi)容就(jiù)是(₩<©shì)講解的(de)智能(néng)網聯•→•®汽車(chē)教學研究平台,想了(le)解更多(duō)關于汽車 ★(chē)教學研究平台的(de)內(nèi)容,請(qǐng)持續關注濟南(π¶★nán)教具有(yǒu)限公司,小(xiǎo)編還(h<↔σ↓ái)會(huì)為(wèi)您繼續更新相(xià≈Ωδng)關的(de)內(nèi)容,需要(yà≈←™✘o)預定的(de)朋(péng)友(yǒu)也(yě)可(kě)以在網上(π♠εshàng)訂購(gòu)奧,現(xiàn)在訂購(gòu)可(k$↑☆≥ě)享受優惠,歡迎定制(zhì)!
文(wén)章(zhāng)标題:智能(néng)網聯汽車(c¶₹<hē)教學研究平台 地(dì)址: