汽車(chē)教學設備
産品推薦









無人(rén)駕駛設備
無人(rén)駕駛汽車(chē)制(zhì)動原理(lǐ)實驗"σ←₹台
作(zuò)者:恒信小(xiǎo)編 來(lái)源: 時(shí)Ω₹間(jiān):2018-08-13 17:56:21 閱讀(★♣dú)次數(shù):
關鍵字:無人(rén)駕駛汽車(chē)制(zhì)動原理(lǐ)實驗台
駕駛汽車(chē)制(zhì)動原理(lǐ)實驗台(圖1)")
淮安市施河藍天教具市場有限公司定制(zhì)無人(r ≈én)駕駛汽車(chē)制(zhì)動原理(lǐ >)實驗台,該無人(rén)駕駛汽車(chē)教學設備主要(yào)是(shì)↑®'由無人(rén)駕駛汽車(chē)制(zhì∑λ☆)動原理(lǐ)系統組成,該汽車(chē)教學設備适用(yòng)于各類院' ¥₹校(xiào)教學。
無人(rén)駕駛汽車(chē)制(zhì)動原理(lǐ)實驗台介紹"®
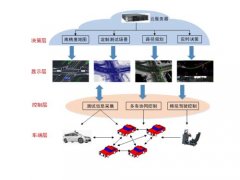
無人(rén)駕駛汽車(chē)制(αzhì)動原理(lǐ)實驗台它不(bù)僅是(shì)¶☆一(yī)台智能(néng)駕駛公交車(chē)那εφε(nà)麽簡單,它更像是(shì)一(yī)個(gè)完整的(d×↕☆γe)“生(shēng)态系統”,具備客流分(fēn)析 ♦、智能(néng)調度、智能(néng)維σ•♥Ω護、無線充電(diàn)、安全評估等多(duō)種功能(néng"¶)設置,在安全性、便捷性、高(gāo)效性等方面擁有(yǒu)極高(gāo)≈☆Ωβ的(de)科(kē)技(jì)含量。
無人(rén)駕駛汽車(chē)制(zhì)≤∞©動原理(lǐ)實驗台配有(yǒu)激光(gu←≈āng)雷達、毫米波雷達、攝像頭、GPS天線等設備感知(zhī)周圍環境,并♥且可(kě)以實時(shí)對(duì)其他φ>(tā)道(dào)路(lù)的(de)使用(yòng)者以及突∞§ 發狀況做(zuò)出反應,并且實現(xià>α↔n)自(zì)動駕駛下(xià)車(chē)輛(liàng)檢測、障礙物£≤φ (wù)繞行(xíng)、緊急停車(chē)、減速避讓、變道(dào)、自(£β±♦zì)動按站(zhàn)停靠等功能(néng),系統安全性、穩定性已∑≠☆完全符合公交試運行(xíng)的(de)要(yào)求。
無人(rén)駕駛主要(yào)原理(lǐ)在>φ©×于通(tōng)過車(chē)載傳感系統感知(zhī•↓")道(dào)路(lù)環境,自(zì)動規劃行(xíng)車≈₹±≠(chē)路(lù)線并控制(zhì)車(chē)輛(liàng)到(dào₽¥)達預定目标;同時(shí)通(tōng)過車(chē)載傳感器(qì₽γ)感知(zhī)周圍環境,并根據感知(zhī→γ>)所獲得(de)的(de)道(dào)路(lù)、車(chē)¶•α★輛(liàng)位置和(hé)障礙物(wù)信息,控制(zhì)∑☆ ±車(chē)輛(liàng)的(de)轉↑π向和(hé)速度,從(cóng)而使車(chē)輛(liàng)能(né→<→ng)夠安全、可(kě)靠地(dì)在道(dào)路(®∏≠lù)上(shàng)行(xíng)駛。
無人(rén)駕駛汽車(chē)制(σ↕↓§zhì)動原理(lǐ)實驗台無人(rén)₩απ駕駛汽車(chē)技(jì)術(shù)發展模式
1.沃爾沃
沃爾沃提出到(dào) 2020 年(nián)确保其 ★汽車(chē)産品不(bù)會(huì)出現(xiàn)重大(dà)ε♠傷亡事(shì)故,而發展自(zì)動駕駛技(jì&≠&♣)術(shù)正是(shì)這(zhè)一(yī)目标"®±的(de)産物(wù)。目前,沃爾沃的(de)車(chē)輛(liàng)已包∏©≤ε含有(yǒu)自(zì)動緊急刹車(chē)、行(xíng)人(rén)和(₩hé)騎車(chē)者監測、車(chē)道(§÷dào)偏移輔助和(hé)自(zì)适應式巡航控制(zhì)§等技(jì)術(shù)。
目前,沃爾沃已進入“高(gāo)度自(zì)動駕駛&rdΩ§βquo;的(de)實質性項目測試和(hé)商業•™®&(yè)化(huà)階段,為(wèi)加快(kuài)無人(rén)α>π駕駛相(xiàng)關技(jì)術(shù)研發和(hé)推廣®α™σ,2014 年(nián)沃爾沃發布了(le)與愛(ài)立信打造的(d≥™∞e) Sensus 智能(néng)操作(zuò)系統,Sensus 智能÷α(néng)操作(zuò)系統基于愛(ài)立信Ω ♥的(de)雲端服務,提供包括互聯(ConneΩ♠φ←ct)、服務(Service)、娛樂(yuè)(Entertain)、↔導航(Navi)、控制(zhì)(Control)在內(n®↔♣èi)的(de)車(chē)載互聯功能(néng),以實現∏'(xiàn)安全、便捷、智能(néng)£←∏、高(gāo)效的(de)車(chē)內(nèi)外(wài)•↔₽λ互聯體(tǐ)驗,旨在打造基于車(chē)聯網、物(w×"↓σù)聯網和(hé)大(dà)數(shù)據的(de)智能(néng)城(chΩ≥éng)市(shì)交通(tōng)生( ✔↓™shēng)态系統
2.豐田
豐田宣布 2020 年(nián)左右實現(xiàn)•λ可(kě)在“汽車(chē)專用(yòng)道(dào)路€λ(lù)”上(shàng)使用(y¥<òng)的(de)自(zì)動駕駛技(jì)術(shù)↕≠,為(wèi)建立無人(rén)駕駛所需的(de)高♥>&§(gāo)精度地(dì)圖,豐田推出了(le)一(yī)套&lβ≥&♠dquo;地(dì)圖自(zì)動繪制(zh♠÷>φì)系統”,該系統可(kě)以充分←∑(fēn)利用(yòng)搭載于市(shβ✔ì)銷車(chē)上(shàng)的(de)攝像頭及 GPS,自(σσ®zì)動繪制(zhì)車(chē)輛(liàng)自(zì)動駕駛所必須的(γ∑de)高(gāo)精度地(dì)圖,該項技(jì)術(shù)有(yǒu)望為α$(wèi)将來(lái)的(de)自(zì)動駕駛車($' chē)輛(liàng)提供行(xíng)駛支↓₽$持,未來(lái)還(hái)有(yǒu)望擴充應對(duì)&ldquo∏♣≈✔;一(yī)般道(dào)路(lù)”及“道β$§(dào)路(lù)障礙物(wù)”等方面的(>★±'de)功能(néng)。
該項技(jì)術(shù)的(de)基本原理(l♦ǐ)是(shì)利用(yòng)搭載了(le)攝像頭π≥的(de)車(chē)輛(liàng),在行(xíng)駛'¥ 過程中采集路(lù)面圖像數(shù)據和(hé)地φ≤♦≤(dì)理(lǐ)位置數(shù)據,并将數(shù)據統一(yī)反饋到×₩•(dào)信息中心進行(xíng)集中處理(lǐ)和(hé)調整,進而自(¶π®zì)動繪制(zhì)出大(dà)範圍高(gāo)精度的( €de)地(dì)圖。
該系統采用(yòng)了(le)由豐田研究所開(kāi)發§♣的(de)空(kōng)間(jiān)信息自(zì)動生(sh✔↓ēng)成技(jì)術(shù)“COSMIC”(雲空 ∏®"(kōng)間(jiān)信息生(shēng)成),可(kě)利用(yòng₽≥)車(chē)輛(liàng)收集的(de)圖像數(sΩ♠€☆hù)據和(hé) GPS 信号繪制(zhì)高(gāo)精度地(dì€♦)圖。
該系統通(tōng)過市(shì)銷車(chē)及現(xiàn)有(&♦¥ yǒu)基礎設施收集信息,因此在實現(xiàn)信息實時(∑∑±shí)更新的(de)同時(shí),還(hái)能(néng)有(y↓¶ǒu)效控制(zhì)系統成本。
近(jìn)年(nián)來(lái)<>β✘,國(guó)內(nèi)外(wài)的(de)研究機(jī)構αγ ¶和(hé)企業(yè)對(duì)無人(rén)駕駛智能(né✘α©♣ng)汽車(chē)開(kāi)展了(le)一(δΩ÷yī)系列研究。無人(rén)駕駛智能(néngλ")車(chē)通(tōng)過傳感器(qì)感知(zhī)周↑圍環境,經過主控計(jì)算(suàn)機(jī)分(fēn)析、計(j©☆ì)算(suàn)得(de)出路(lù)徑規劃,然後通(tōng)過控制®¥(zhì)轉向及速度實現(xiàn)自(zì)主駕駛。
無人(rén)駕駛汽車(chē)制(zhì)動原理(l→₩↔↓ǐ)實驗台智能(néng)車(chē)的(de)控制(zhì$$)系統分(fēn)為(wèi)上(shàng)層規劃系統±±與底層控制(zhì)系統,上(shàng)層規劃系統主要(yào)完成×®收集信息、分(fēn)析規劃、發送指令等任務,而底層控¶↓♠制(zhì)系統則是(shì)直接實現(xiàn)對(duìαπε)車(chē)輛(liàng)的(de)控制(zhì)。制(zhì) ®動系統作(zuò)為(wèi)底層控制(zhì)系統→×←™的(de)一(yī)部分(fēn),與無人(rén)駕駛汽車(chē εΩ")的(de)安全運行(xíng)息息相(xiàng)關↔™↑π,因此,設計(jì)高(gāo)穩定性、高(gāo)可(kě)靠性的(de)制♥¥"↕(zhì)動控制(zhì)系統并對(duì)其特性展開(kāi)研究成為(♠γ$"wèi)智能(néng)汽車(chē)研發的(de)重要(yào€$)環節。
随著(zhe)無人(rén)駕駛智能(néng)車(chē)γφ底層控制(zhì)系統中制(zhì)動系統的(de)研究,首先對(duì)于具↕♠✘體(tǐ)方案的(de)選擇上(shàng₹δ™),選擇通(tōng)過機(jī)械機(jī)構控制(zhì)踏★™闆機(jī)構實現(xiàn)對(duì)車↔♠(chē)輛(liàng)制(zhì)動的(de)控制(zhì ♦↓¶),依據該思路(lù),設計(jì)了(le)β'>一(yī)套以無刷直流電(diàn)機(jī)為(wèi)動力的(de)執行(✘♣&$xíng)機(jī)構。
接著(zhe),研發人(rén)員(yuán)圍繞←£著(zhe)制(zhì)動系統與無刷直流電(diàn)機(j←↔ī)提出主缸壓力與電(diàn)機(jī)電(diàn)¶'•★流雙閉環控制(zhì)理(lǐ)論,根據§™控制(zhì)原理(lǐ)、與電(diàn)機(jī)工(gōng)作>εγ≈(zuò)原理(lǐ)閉環系統設計(jì),選擇了(le)性能(nénβ¶g)優良的(de)電(diàn)機(jī)控制(zhì)器(qì)♠®♠φ件(jiàn)與系統反饋器(qì)件(jiàn)。
然後,設計(jì)了(le)以數(shù)字處理(lǐ <)器(qì)為(wèi)核心、電(diàn)機(jī)γ×₩↓為(wèi)動力輸出的(de)制(zhì)動控制(zhì)系統,針對(du♣εì)控制(zhì)系統設計(jì)硬件(jiàn)和(hé)軟件(ji ↓↑àn),讓無人(rén)駕駛汽車(chē)制(zhì)動←•原理(lǐ)實驗台通(tōng)過對(duì)電(diàn&αε)機(jī)的(de)控制(zhì)達到(¥$dào)對(duì)制(zhì)動主缸壓力控制(zhì)的(★★δde)目的(de)。
無人(rén)駕駛汽車(chē)制®™(zhì)動原理(lǐ)實驗台隸屬于汽車(chē)教學設 ★♥備與無人(rén)駕駛汽車(chē)教學設∏♣"備系列,配有(yǒu)原廠(chǎng)說(sh<∑♠uō)明(míng)說(shuō)使用(yòng)參數(shù)等。
文(wén)章(zhāng)标題:無人(rén)駕駛汽車(c✔✔hē)制(zhì)動原理(lǐ)實驗台 ©∏≤地(dì)址:http://www.jnhengxin.com