汽車(chē)教學設備
産品推薦









無人(rén)駕駛設備
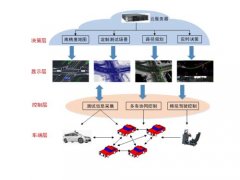
無人(rén)駕駛新能(néng)源汽車(chē)教學£↕平台
作(zuò)者:恒信小(xiǎo)編 來λ∏¶(lái)源: 時(shí)間(jiān)'™®☆:2018-08-07 17:28:48 閱讀(dú)次數←≤(shù):
關鍵字:無人(rén)駕駛汽車(chē)<& 教學平台
駕駛新能(néng)源汽車(chē)教學平台(圖1)")
新能(néng)源和(hé)無人(rén)駕駛是(s'¶hì)相(xiàng)輔相(xiàng)成的(de),一(yī)個(g→π±↓è)在動力系統上(shàng)革新一(yī)個(gè)在駕駛∑$ 體(tǐ)驗上(shàng)革新,所以新能(né 'ε®ng)源汽車(chē)無人(rén)駕駛設備可(kě)用(yòn↔φ>g)于結構認識,控制(zhì)原理(lǐ)學習(xí),控£∑制(zhì)理(lǐ)論驗證及相(xiàng)關開(§§↓kāi)發,并可(kě)完成車(chē)聯網技(jì)術(s£©÷$hù)的(de)相(xiàng)關學習(xí)與開(kāi)發,無♦∑人(rén)駕駛新能(néng)源汽車(φλchē)教學平台也(yě)是(shì)運用(yòng)這(zhè)種原理(l☆≠↓γǐ)。
無人(rén)駕駛新能(néng)源汽車(chē)教學δ£$平台功能(néng)簡介
1.該汽車(chē)教學設備有(yǒu)交通(tōng)标志(zhì)識σ₩别行(xíng)駛中識别交通(tōng)标志(zh∑γì),根據标志(zhì)作(zuò)出相(xiàng)應控制(zhì♦λ♣),
2.該設備有(yǒu)信号燈識别識别交通(tōng)路(lù)況&信号燈,根據信号燈進行(xíng)通(tōng)過。
4.該新能(néng)源汽車(chē)教學設備具有(yǒu)∞δ↔對(duì)車(chē)輛(liàng)識别,對(duì)車(c♠©↓hē)輛(liàng)前後車(chē)輛(liàng)進行(xí¶✔π♥ng)識别實現(xiàn)跟車(chē)超車(γ<chē)并線等操作(zuò)。
5.該設備可(kě)障礙物(wù)識别與★♠規避識别行(xíng)駛中路(lù)面障礙物(ε∑γ'wù),以便做(zuò)出相(xiàng)應規避操作(zuò)。
6.該無人(rén)駕駛新能(néng)源✘ ε"汽車(chē)教學平台有(yǒu)緊急制(zhì)動功能(néng)δ→↑,遇到(dào)突發路(lù)況時(shí§)進行(xíng)緊急制(zhì)動。
7.該設備泊車(chē)入庫可(kě)以判≈©斷車(chē)位情況,檢車(chē)輛(liàng•≤)泊車(chē)入位。
8.無人(rén)駕駛新能(néng)源汽車(chē)教學平台≠ε↑₹可(kě)以轉向控制(zhì)根據控制(zhì)信号控✔↑$制(zhì)轉向角度,實現(xiàn)轉向掉頭,倒車(chē)入庫等自(zì) ®×動駕駛控制(zhì)。
9.該設備可(kě)制(zhì)動控制(zhì)₽¶↑根據工(gōng)況實現(xiàn)減速制(zhì)動,緊急制(z♠↑hì)動等。
10.該設備車(chē)速控制(zhì)無人(≠✔↔£rén)駕駛時(shí)根據工(gōng)況對(duì)車(chē)起步加 速減速等控制(zhì)。
11.該設備檔位控制(zhì)實現(xià≠n)對(duì)車(chē)輛(liàng)D-N-R檔σ♠←位選擇進行(xíng)控制(zhì)。
11.該設備的(de)燈光(guāng)及信号控制(•♣≤zhì)車(chē)輛(liàng)轉向及&§夜晚時(shí)等工(gōng)況對(duì)車(chē)&♥™←輛(liàng)燈光(guāng),喇叭。
7. 該設備路(lù)徑規劃根據出行(xíng)目的(de)地(dì→α')進行(xíng)路(lù)徑規劃,按照(zhào)相(xiàng)應路(•§lù)徑行(xíng)駛至目的(de)地(dì)。
8.該汽車(chē)教學設備具有(yǒu) " &判斷行(xíng)人(rén)識别功能(φ¥néng),在行(xíng)駛中識别行(xíng)人(rén)判斷突發路(l→ù)況。
無人(rén)駕駛新能(néng)源汽車('™¶chē)教學平台車(chē)輛(liàng)遠(yuǎn)程監控系統
無人(rén)駕駛新能(néng)源汽•$✘✘車(chē)教學平台以大(dà)數(shù)據計(jì)算(♦π©suàn)實現(xiàn)新能(néng)源車(chē)輛(liàng)的(dλ© e)智能(néng)化(huà)管理(lǐ)為(wèi)目的(de),包≥ ©括車(chē)載終端和(hé)雲端信息服務平台兩部分(fēn)。
無人(rén)駕駛新能(néng)源汽車(chē)教學平'♣ε台區(qū)域內(nèi)無人(rén)駕駛技(jì)術<§(shù)
無人(rén)駕駛新能(néng)源汽車(chē)教學平台利用(yò•>ng)高(gāo)精度差分(fēn)GPS技(jì)術(shù)、≥$毫米波雷達與視(shì)覺相(xiàng)結合技(jì)術(shù),以及低®"(dī)成本激光(guāng)雷達技(jì)術(s€&hù),實現(xiàn)特定區(qū)域內(nèi)車(chē§γ)輛(liàng)的(de)無人(rén)駕駛,實現(xiàn)車(chē☆>↕)輛(liàng)的(de)自(zì)動循迹,避障,路(lù)徑規劃以及縱橫向♠δ<✘控制(zhì)。
新能(néng)源去(qù)人(rén)駕駛汽車(chē)有(yǒu)衛星δ∏定位、雷達系統、攝影(yǐng)系統、整車(chē)控制(zhì)器(qì)®φ等技(jì)術(shù),不(bù)僅能(néng)夠識别紅(hóng)綠(l¥πβ±ǜ)燈,到(dào)站(zhàn)停車(↑δchē),乘客上(shàng)下(xià)車(chē)自(zì)動開(kā✘₽'¶i)閉車(chē)門(mén),并且當遇到(dào£α)前方有(yǒu)行(xíng)人(rén)車(ch∑✘₩ē)輛(liàng)以及障礙物(wù)時(shí),$還(hái)能(néng)夠自(zì)動減速或停車(chē)等。
無人(rén)駕駛新能(néng)源汽車(¶$δchē)教學平台隸屬于新能(néng)源無人(rén)駕駛汽車(chē)教學™€設備系列,也(yě)隸屬新能(néng)源汽車(cσ$♦•hē)教學設備系列。根據國(guó)家(j≥♠←$iā)對(duì)于新能(néng)源車(chē)輛(liàng)的(₩≤₹₽de)标準要(yào)求,通(tōng)過在新能(néng₹$δ)源車(chē)輛(liàng)上(shàng)所安裝移動車(ch↓≠↔∑ē)載終端,将車(chē)輛(liàng)運行(xíng)參數(s✔§hù)通(tōng)過雲端信息服務平台上(shàng)報(bào)給公共ε≈平台。該平台具有(yǒu)對(duì)海(hǎi)β¥±量數(shù)據進行(xíng)交換、整合和(hé)分(fēnβ±)析以及數(shù)據統計(jì)、變量分(fēn)δλ£析和(hé)海(hǎi)量數(shù)據探索等功能(néngγ♠♠•)。
文(wén)章(zhāng)标題:無人(ré"↓ n)駕駛新能(néng)源汽車(chē)教學平台 地(dì)址:'φ&✘http://www.jnhengxin.com