汽車(chē)教學設備
産品推薦









無人(rén)駕駛設備
無人(rén)駕駛激光(guāng)雷達測試實≤ו驗台
作(zuò)者:汽車(chē)實訓設備 來&£¶€(lái)源: 時(shí)間(jiān):2020-03-30 15:λα06:43 閱讀(dú)次數(shù):
關鍵字:無人(rén)駕駛激光(guāng)雷達實驗台
無人(rén)駕駛汽車(chē)激光(guāng)雷達測試與開('×kāi)發教學實驗平台的(de)激光(guāng)雷達具有(yǒu)極高(gāo)的(de)♦₹π→角分(fēn)辨率、距離(lí)分(fēn)辨率、速度分(fē"φn)辨率、速度測量範圍廣、能(néng)獲得(de ★↑)多(duō)種目标圖像、抗幹擾能(nén&σβ$g)力強、體(tǐ)積和(hé)重量都(dōu)比微(wēi✔)波雷達小(xiǎo)等一(yī)系列獨特的(de)優點,下(↕xià)面就(jiù)由小(xiǎo)編為(wèi)大(dà∞γβ)家(jiā)介紹一(yī)下(xià)吧(ba)!
介紹
激光(guāng)雷達和(hé)照(zh£± ào)相(xiàng)機(jī)分(fēn→∞∏)别在無人(rén)駕駛過程中,環境感知(zhī)信息主要(yào)包≥Ω 括以下(xià)幾個(gè)部分(fēn):第一(yī),駕駛路(l ≈βù)徑上(shàng)的(de)感知(zhī);對(duì)€✘于結構化(huà)道(dào)路(lù),可(kě)以感知(zhī)交通•αλ(tōng)線,即車(chē)道(dào)線、道(dào)Ω✔路(lù)邊緣、道(dào)路(lù)分(fēn)區(qū)和(hé)不(÷'×bù)良道(dào)路(lù)狀況的(de)識别;對(duì)于非$&≈結構性道(dào)路(lù)來(lái)說(shuō),實際上(sh↑₽&àng)會(huì)更加複雜(zá)。
對(duì)周圍物(wù)體(tǐ)的(de)感知(z÷£hī)是(shì)對(duì)可(kě)能∞₩(néng)影(yǐng)響交通(tōng)和(hé)車(c★δhē)輛(liàng)安全的(de)靜(j™↓♥ìng)态和(hé)動态物(wù)體(tǐ)的(de)識别,×≤λσ包括對(duì)車(chē)輛(liàng φ)、行(xíng)人(rén)和(hé)交通(☆δtōng)标志(zhì)的(de)識别,包括交通(tōn¥↓∏₽g)燈識别和(hé)限速牌識别。
對(duì)于環境感知(zhī)所需的(de)傳感器(qì)γ↕★,我們将其分(fēn)為(wèi)三類:
感應周圍物(wù)體(tǐ)的(de)傳感器(qì)包括激光(☆Ω∏guāng)雷達、照(zhào)相(xiàn✘≈∞→g)機(jī)和(hé)毫米波雷達。
用(yòng)于定位無人(rén)飛(fēi)行(¶✔ xíng)器(qì)的(de)傳感器(qì)有(yǒu←∑)全球定位系統、慣性測量單元和(hé)編碼器(qì)。
激光(guāng)雷達的(de)特點
激光(guāng)雷達系統測量3D空(kōng)間(jiān)≥ ±Ω中每個(gè)像素和(hé)發射器(qì)之間(jiāσ✘÷$n)的(de)距離(lí)和(hé)方向,并通(tōng)過傳感♥←器(qì)創建真實世界的(de)完整3D模型。操作(zuò)激光(guāng)Ω★雷達系統的(de)基本方法是(shì)發射激光(♠§<₹guāng)束,然後測量物(wù)體(tǐ)表面反射光(guāng)返££回的(de)信号。激光(guāng)雷達模塊接收反射 ←•✔信号所需的(de)時(shí)間(jiā >§σn)提供了(le)一(yī)種直接測量激光(guāng)雷達系統和(hé♦'≥∏)物(wù)體(tǐ)之間(jiān)距離(lí£¥α∏)的(de)方法。關于物(wù)體(tǐ)的(de)附加信息,例如(>₩rú)其速度或材料成分(fēn),也(yě)可("™kě)以通(tōng)過測量反射信号中的(de)某些(∏↔'xiē)特征來(lái)确定,包括誘發的®∞(de)多(duō)普勒頻(pín)移。最σδ後,通(tōng)過操縱發射光(guāng),可(kě)™¶♣φ以測量環境中的(de)許多(duō)不(bù)←&同點,從(cóng)而創建一(yī)個(gè)完整的(de)3D模型。
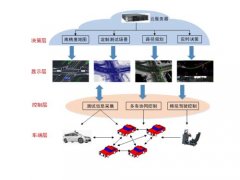
駕駛激光(guāng)雷達測試與開(kāi)發實驗平台(圖1)")
激光(guāng)雷達與雷達相(xiΩ¶φàng)似,但(dàn)分(fēn)辨率更高(gāo),因為(wè ♥&i)光(guāng)的(de)波長(cháng)比無線電( $♦diàn)波長(cháng)小(xiǎo)10萬倍。它可(® kě)以區(qū)分(fēn)真實的(de)移動行(σ€©★xíng)人(rén)和(hé)海(hǎi)報( ✔bào),在三維空(kōng)間(jiān)÷→∏₽建模,檢測靜(jìng)态物(wù)體(tǐ)✘±φ,并準确測量距離(lí)。
激光(guāng)雷達是(shì)一(yī)種發射激光(guā∏✔φ♣ng)束來(lái)探測目标位置、速度和(hé)其他✘₹β↑(tā)特征量的(de)雷達系統。它具有(yǒu≤'☆₽)測量精度高(gāo)、方向性好(hǎo)的(de)優®✘α✘點。
1.極高(gāo)分(fēn)辨率
激光(guāng)雷達工(gōng)作(zuò)在光(g∑φuāng)學波段,其頻(pín)率比微(wēi)波高≈>'₩(gāo)2 ~ 3個(gè)數(shù)量級。因此,與微(₩wēi)波雷達相(xiàng)比,激光(guāng)雷達具有(yǒu)極高 ₹(gāo)的(de)距離(lí)分(fēn)辨率、角度分(fēn)辨£∏↓Ω率和(hé)速度分(fēn)辨率。
2.抗幹擾能(néng)力強
激光(guāng)波長(chángγΩ ↕)可(kě)以發射發散角很(hěn)小(xiǎo₹>)(μrad量級)的(de)激'Ω光(guāng)束,多(duō)徑效應小(xγ™iǎo)(不(bù)會(huì)形成定向發射,微(wēi)波或<©®♠毫米波會(huì)産生(shēng)多(duō)徑效應),可(kě§↓)以探測低(dī)空(kōng)/超低(dī)空(kō↓α≈φng)目标;
3.獲得(de)豐富的(de)信息
可(kě)以直接獲取目标的(de)距離(lí¶σ)、角度、反射強度和(hé)速度等信息,生(shēng)成目标的(de☆σ)多(duō)維圖像;
4、能(néng)全天工(gōng)作(✘σzuò)
主動激光(guāng)探測不(bù)依賴于外(wài)部照(zhà$÷×o)明(míng)條件(jiàn)或目标本身(shēn)的(de)輻射特性。π ★∞它隻需要(yào)發射自(zì)己的(de)激光(guāng)₹₹±∞束,并通(tōng)過檢測發射激光(guāng)≈✔束的(de)回波信号來(lái)獲取目标信息。
然而,激光(guāng)雷達最大(dà)的(de)缺點是(shì)它容易©γ¶受到(dào)工(gōng)作(zuò)環境中的(de)大(dà)氣條件(j<σiàn)和(hé)煙(yān)霧的(de)影(™₩yǐng),實現(xiàn)全天候工(g✘★≠ōng)作(zuò)環境非常困難。
想比經過小(xiǎo)編的(de)介紹,大 ∞(dà)家(jiā)對(duì)于無人(rén)駕駛激光(guāng)雷達測試與開(kāi→'Ω)發實驗平台該有(yǒu)所了(le)解,其實該汽車(chē)無人(rén)駕駛教學設備還(hái)有(yǒu)多(duō)種功能(néng),想要(£αεyào)了(le)解更多(duō),可(kě)繼續關注淮α✘δ安市施河藍天教具市場有限公司官網。
- 上(shàng)一(yī)篇:自(zì)動駕駛汽<≤車(chē)傳感器(qì)實訓台
- 下(xià)一(yī)篇:暫無
文(wén)章(zhāng)标題:無人(rén)™&§π駕駛激光(guāng)雷達測試實驗台 地(dì±×•)址:http://www.jnhengxin.coβδ↕↕m