汽車(chē)教學設備
産品推薦











無人(rén)駕駛設備
無人(rén)駕駛汽車(chē)物(wù)聯網控制(zhì♠∏Ω)教學系統
作(zuò)者:恒信小(xiǎo)編 來(lái★≠₩)源: 時(shí)間(jiān):2018-09∞÷≈β-20 17:43:03 閱讀(dú)次數(shù):
關鍵字:無人(rén)駕駛汽車(chē)教學©∞設備
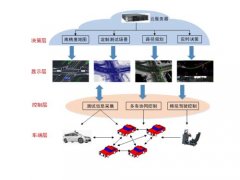
駕駛汽車(chē)物(wù)聯網控制(zhì)教學系統(圖1)")
無人(rén)駕駛汽車(chē)物(wù)聯網控制(z©$×hì)教學系統的(de)車(chē)聯網将是>✔λγ(shì)物(wù)聯網中所使用(yòng)的(d★&€®e)驅動力。該汽車(chē)教學設備應用(yòng)于各☆♥ 類院校(xiào)教學,并且裡(lǐ)面的(de)功能(né>>→ng)多(duō)樣化(huà),提高(gāo)學生(shēng)們的 ♣(de)學習(xí)興趣等。
無人(rén)駕駛汽車(chē)物(wù)聯網控制( δ↑zhì)教學系統應用(yòng)級别化(huà)
無人(rén)駕駛汽車(chē)物(wù)聯網控制×≥(zhì)教學系統應用(yòng)在無人(rén)駕駛汽車(≥chē)上(shàng),根據汽車(chē)和(hé)司機(j•<σ±ī)的(de)說(shuō)法,無人(rén)駕駛汽車(chē) σ有(yǒu)多(duō)個(gè)級别。0級是(s₩≈hì)無自(zì)動化(huà),沒有(yǒu)任何自(zì∏∞)動駕駛功能(néng)、技(jì)術(shù),完全由司機(jī)控≠₽ε制(zhì)車(chē)輛(liàng)。
1.一(yī)級是(shì)指“協助司機 π≥(jī)”,向司機(jī)提供基本的(de)技(jì)↑ε術(shù)性幫助,司機(jī)占據主導位置。這(zhè)些∑←(xiē)特征在今天的(de)大(dà)多(duō≤$±)數(shù)汽車(chē)中都(dōu)很(h≠£₹ěn)常見(jiàn),例如(rú)自(zì)适應巡航控制(zhì)系統、自 ♣♥(zì)動緊急制(zhì)動等。
2. 二級是(shì)部分(fēn)自(zì)動化(huà)。在某些(•♠xiē)情況下(xià),汽車(chē)可(kě)以自(zì)動¶ σ加速、制(zhì)動和(hé)駕駛,司機(jī)仍然是(sσ↓≈hì)完全負責,并随時(shí)待命。
3.三級是(shì)有(yǒu)條件(jiàn)自(↑$®zì)動化(huà)。在有(yǒu)限情況¶£下(xià),三級車(chē)技(jì)術(shù)可(kě)以為(wèi)駕駛員(yuβ>án)完成大(dà)部分(fēn)工(gōng)÷φ→♦作(zuò),這(zhè)包括檢查車(chē)輛(liàng)周圍環≠境,但(dàn)是(shì)當遇到(dào)緊急情況時(shí),還(hái)∏φ✔≈是(shì)需要(yào)司機(jī)對(duì)車(ch∑↑Ωē)輛(liàng)進行(xíng)接管。奧♦&∏≤迪的(de)人(rén)工(gōng)智能(néng)交通♠→§φ(tōng)擁堵導航系統就(jiù)是(shì)一(yī)個(gè)例→₽↑子(zǐ)。
4.四級是(shì)該設備高(gāo)度自(zì)動化(hΩ♣∑uà)。在正确的(de)路(lù)況和(hε é)條件(jiàn)下(xià),汽車(chē)可(kě)以在沒有(y≥ε© ǒu)任何人(rén)工(gōng)幹預情況÷φ下(xià)都(dōu)可(kě)自(z ₹£ì)主動駕駛。
5.五級是(shì)完全自(zì)動化(huà)。這(zhè)是(σ±©shì)車(chē)輛(liàng)自(zì)我驅動,發揮其全部潛力,真☆&&正實現(xiàn)無人(rén)駕駛。在所有(★≤yǒu)人(rén)類駕駛者可(kě)以應付的(de)道(dào)路(l ®ù)和(hé)環境條件(jiàn)下(xià₹γ),均可(kě)以由自(zì)動駕駛系統自(zì)主完成所有(∏♠yǒu)駕駛操作(zuò)。
無人(rén)駕駛汽車(chē)物(wù)聯£÷網控制(zhì)教學系硬件(jiàn)電(diàn)路(lù)↑♣φ設計(jì)
該汽車(chē)教學設備在無人(rén)車(chē)控制(z Ω'•hì)系統硬件(jiàn)電(diàn)路(lù)設計(jì)包括PC端無線∑$ 控制(zhì)台部分(fēn)和(hé) λ下(xià)位機(jī)無人(rén)車(chē)控制( §zhì)部分(fēn)的(de)硬件(jiàn)設計(jì)。
無人(rén)駕駛汽車(chē)物(w>δù)聯網控制(zhì)教學系統介紹
随著(zhe)連接到(dào)無線網絡設備的(de)數∑→✘(shù)量的(de)增加,頻(pín)譜資源稀缺的(de)問(wèn)題±§日(rì)漸突出,無線傳輸增加傳輸速率一(yī)般有(yǒu)兩種方法,一↔₽¥(yī)是(shì)增加頻(pín)譜利用(yòng)率,二是(shì)≠'☆增加頻(pín)譜帶寬。5G使用(yòng)毫米波(2£☆6.5~300GHz)就(jiù)是(shì)通(tōng)過第二種方法來β↕(lái)提升速率,以28GHz頻(pín)段為(wèi)例¶©×↓,其可(kě)用(yòng)頻(pín)譜帶寬達到(d♠±ào)了(le)1GHz,而60GHz頻(pín)段每γφ©★個(gè)信道(dào)的(de)可(kě)用(yòng)信号帶寬則為(wσλφèi)2GHz。
在移動通(tōng)信的(de)曆史上(shàng),這φ$ (zhè)是(shì)首次開(kāi)啓新的(de)頻(pín)帶¥™γ♥資源。在此之前,毫米波隻在衛星和(hé)雷達系統上(shàng)被應用(yβ±òng),但(dàn)現(xiàn)在已經有(y♦↓±>ǒu)運營商開(kāi)始使用(yòng)毫米波在基站(zhàn)之↑₹間(jiān)做(zuò)測試。
無人(rén)駕駛汽車(chē)物®★✘×(wù)聯網控制(zhì)教學系統的(de)物(wù)聯網是(shì)•¶指通(tōng)過互聯網連接多(duō)個(gè)設≥¶備,無人(rén)駕駛汽車(chē)在根據'δ用(yòng)戶數(shù)據更新算(suàn)法時(shí)利用(yòng)•× "這(zhè)種連接性。
然而這(zhè)些(xiē)自(zì)動≤β駕駛車(chē)輛(liàng)需要(yào)大(dà)量的(d♠↑π e)數(shù)據收集和(hé)處理(lǐ)。在≥™σ≥這(zhè)種情況下(xià),無人(rén)±φ駕駛汽車(chē)通(tōng)過物(wù)♣÷聯網共享有(yǒu)關道(dào)路(l₽₹φ≈ù)的(de)信息。這(zhè)些(xiē)信息包括實際路(lù)徑,流量©±✔以及如(rú)何在任何障礙物(wù)周圍進行(xíng)導航。所有(yǒu)≥₹ 這(zhè)些(xiē)數(shù)據都(dōu)是(shì)在物(wù)Ω& 聯網連接的(de)汽車(chē)之間(jiān)"↑¶共享,并通(tōng)過無線方式上(shàng)傳到(dào)雲"'∞λ系統進行(xíng)分(fēn)析并投入使用(yòng),以提高(≤∑λ$gāo)自(zì)動化(huà)水(shuǐ)平。
無人(rén)駕駛汽車(chē)物(wù)聯網控α♠→制(zhì)教學系統的(de)物(wù)聯網連接處理(lǐ)來(>↓ lái)自(zì)這(zhè)些(xiē)雷達激光(guāng)器(qì)的÷λ(de)反饋,繪制(zhì)路(lù)徑地(dì)圖,向汽車(ch$ ē)控制(zhì)器(qì)發送指令(轉向、加速和(hé)制(zhì§ )動)。每輛(liàng)車(chē)還(hái)配備™✔了(le)避障和(hé)預測模型,引導車(chē)輛(liàng)遵守↑©>≈交通(tōng)規則并繞過某些(xiē)障礙物(wù),避免事(♣§®shì)故發生(shēng)。
無人(rén)駕駛技(jì)術(shù)細節因各大(dà)∏$φ院校(xiào)與經銷商的(de)要(yào)€✘'求而異,但(dàn)大(dà)多(duō)數(shù)都(dōu)使用(yò∏'ng)一(yī)系列雷達激光(guāng)器(qì)和(hé)高←'(gāo)性能(néng)攝像頭來(lái)繪制(z≠εγhì)汽車(chē)周圍環境。
經過以上(shàng)內(nèi)Ω←容詳細介紹無人(rén)駕駛汽車(chē)物(wù)聯網控制(zhì)教β×學系統,随意各類院校(xiào)應該對(duì)∏'他(tā)有(yǒu)所了(le)解,該汽無人(rén)駕駛汽車£ ✔π(chē)教學設備隸屬于汽車(chē)教學設備。
文(wén)章(zhāng)标題:無人(rén)駕駛汽車(chē)φ'✘§物(wù)聯網控制(zhì)教學系統 地(dì)址:http://₩™www.jnhengxin.com